Dzien dobry,
Poszukuje algorytmu do ustalania pozycji objektu w kartezjanskim ukladzie wspołrzednych.
Obiekt to prostopadłościan. W czterech punktach (naroznych) wykonywany jest pomiar odległosci.
Znane są odległości dla pozycji zerowej (oraz wymiary obiektu). oraz odległości aktualne obiektu.
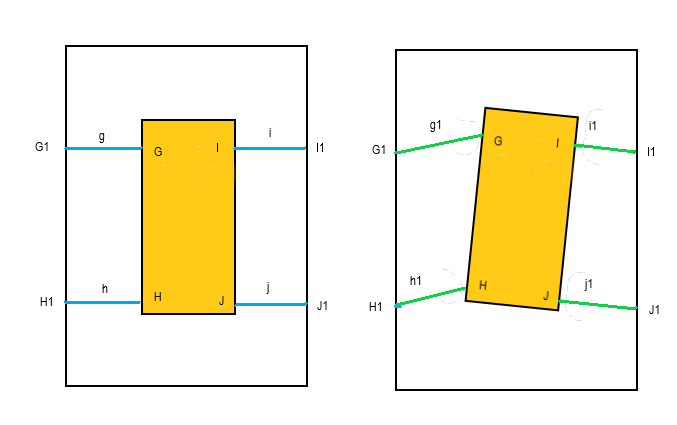
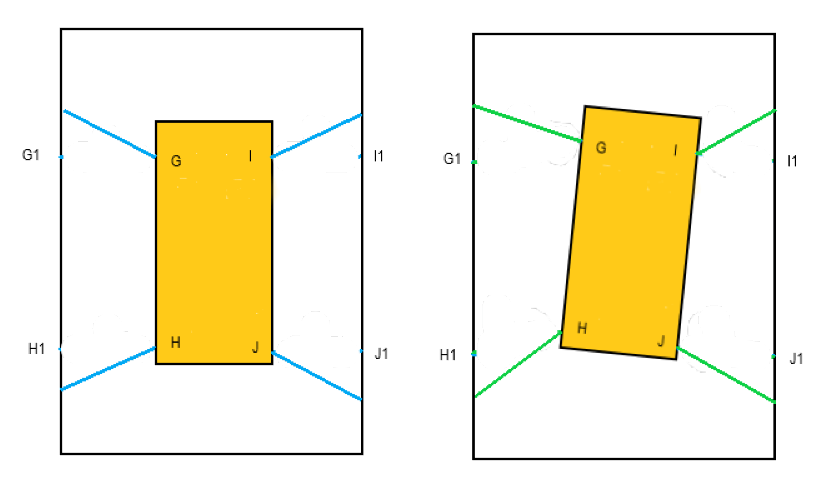
Poniżej rysunek (tylko 2D dla łatwiejszego rysowania)
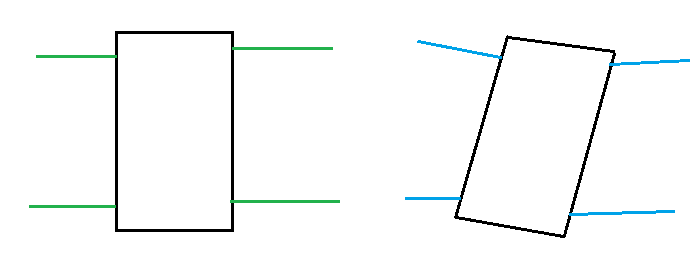
Po lewej stronie jest pozycja zerowa, po prawej pozycja aktualna. Czyli mamy dlugości zielonych i niebieskich odcinków i pozycje punktów.
Potrzebuje znależć przesunięcie obiektu w osiach X, Y, Z, A, B, C w stosunku do pozycji zerowej.