Jakiś czas temu (a raczej rok temu...) wpadłem na pudełko z różnymi częściami i postanowiłem w końcu zbudować model samochodu zdalnie sterowanego; Jednak czasu i chęci brakło, więc po jakimś czasie zapomniałem o tym; Znów przyszły długie, prawie zimowe wieczory, a i od komputera trzeba trochę odpocząć, dlatego też wracam do tego projektu - tym razem na poważnie;
Dlaczego samochód RC?
Głównie dlatego, że zawsze chciałem taki model zbudować sam, ale do tej pory albo nie miałem odpowiednich materiałów, albo nie miałem na to czasu, albo brakowało wiedzy czy pomysłów; Teraz czasu sobie trochę wygospodaruję, elektronikę mam (a czego nie mam to jeszcze leci lub znajdę/kupię), pomysłów oraz materiałów aż za dużo, więc nic tylko usiąść i dłubać;
Wiele razy szukałem w sieci materiałów na temat budowy takiego modelu - podobnych do tego co chcę zrobić projektów nie znalazłem; To znaczy podobne nawet były, ale zawsze czegoś brakowało - albo ktoś robił duży model (np. spalinowy), albo używał gotowych części z innych modeli lub nawet całych konstrukcji, albo wykonanie było bardzo niechlujne (jakiś karton, drewno, ciężkie płytki stalowe, całość zapaprana gorącym klejem z pistoletu, innymi klejami czy taśmami, po prostu brzydkie, nieestetyczne wykonanie);
Jeśli wszystko pójdzie po mojej myśli to będzie super materiał na temat tego, jak samemu w domowych warunkach zrobić malutki, funkcjonalny, ładny i tani model;
Opis projektu
Projekt ten dotyczyć będzie budowy małego samochodu RC, wielkości mniej więcej małej koperty na listy (jego długość i szerokość); Ma być jak najmniejszy, jak najlżejszy i niezbyt szybki (aby nie trzeba było lotniska do zabawy); Charakteryzować będzie go głównie:
- wykonanie od podstaw modelu oraz pilota do sterowania,
- wykorzystanie do budowy konstrukcji materiałów dostępnych w każdym domu,
- porządna, skręcana konstrukcja (aby można było ją łatwo rozbierać i modyfikować),
- niezależne zawieszenie, jak w profesjonalnych modelach,
- płynna regulacja skrętu kół oraz obrotów silnika napędzającego,
- łożyskowane koła oraz tylni "dyfer",
- estetyczne wykonanie,
- bardzo niskie koszty, rzędu 50-60zł;
Model na pewno będzie posiadał serwomechanizm TowerPro SG90 do sterowania wychyleniem przednich kół, modelarski mikro-silnik Graupner SPEED 265 do napędu tylnej osi, a także Arduino Nano Mini, jako komputer pokładowy i moduł do nadajnika; Co do pozostałych układów elektronicznych i zasilania to jeszcze się zobaczy; Do zasilania raczej na pewno użyję dwóch akumulatorków z telefonów komórkowych, bo są małe, lekkie i pojemne;
Jedynymi gotowymi elementami będą układy elektroniczne (które trzeba będzie ze sobą odpowiednio połączyć) oraz serwo i silnik; Wszystko pozostałe, czyli calutka konstrukcja podwozia, kół i nadwozia, zostanie wykonana ręcznie;
Fazy projektu
Może nie tyle fazy projektu, co podział tego wątku na kilka części, coby porządek zachować:
- ogólna dyskusja - czas na ogólne pytania i odpowiedzi, a także na równoległe próby związane z wykonaniem części, dobór materiałów, narzędzi, obmyślenie całości itd.,
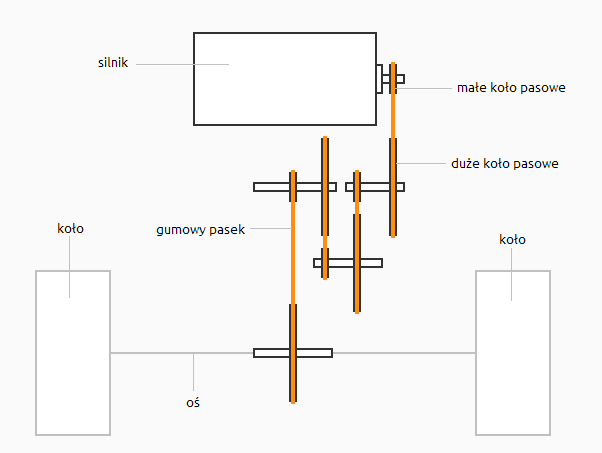
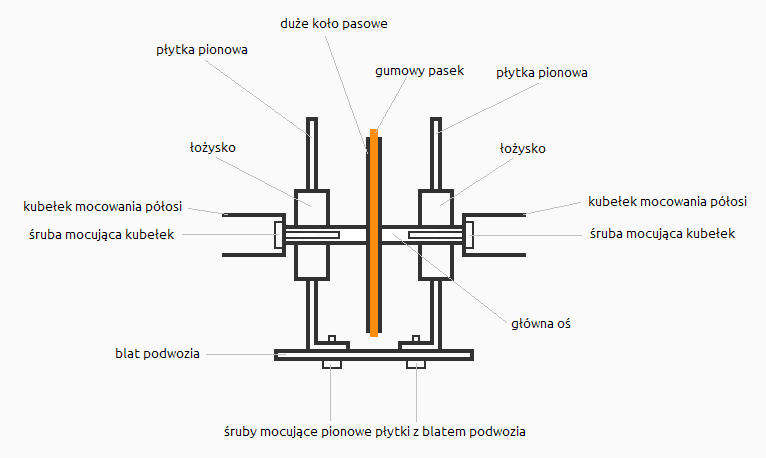
- wykonanie podwozia - faza budowy blatu podwozia, zawieszenia, kół, budowy kompletnego układu kierowniczego i przekładni tylego napędu, a także osadzenia serwomechanizmu i silnika napędowego,
- łączenie elektroniki - czas na połączenie ze sobą wszystkich układów, przygotowanie konstrukcji do ich zamocowania, a także na zaprogramowanie Arduino,
- budowa nadwozia - faza projektowania i wykonania nadwozia, a także przygotowania uchwytów do jego mocowania,
- budowa pilota - skonstruowanie nietypowego pilota, własnego pomysłu;
Budowa tego modelu na pewno potrwa co najmniej dwa miesiące, dlatego że nigdzie się nie spieszy; Jak będę się spieszył to ładnie i dobrze raczej nie wyjdzie; Poza tym czekam na niektóre układy elektroniczne, które mogą lecieć do mnie jeszcze nawet miesiąc; Tak więc model będę robił powoli i dokładnie, aby wyszedł idealnie;
Chętni do przyłączenia się
Nie mam tutaj na myśli chętnych do pomocy przy zbudowaniu modelu - wszystko dotyczące konstrukcji modelu i pilota mam przemyślane i wiem co i jak wykonać, natomiast z elektroniką i programowaniem pomaga mi @Marooned, bo w tym temacie nie jestem zbyt mocny;
Jeśli ktoś też chciałby w wolnym czasie trochę podłubać i zbudować taki model to niech zgłosi się w poście; W takim przypadku mogę szczegółowo opisywać jak i z czego dokładnie kolejne części układanki powstają, wrzucać nie tylko zdjęcia, ale też jakieś schematy czy pseudo-rysunki techniczne - po prostu wszystkie potrzebne informacje; A jeśli nikt nie będzie chętny to w kolejnych swoich postach będę po prostu pisał co nowego i wrzucał fotki, żeby zbytnio nie przeciągać;
Podsumowanie
Póki co mamy fazę pierwszą, czyli ogólną dyskusję; W międzyczasie poeksperymentuję nieco z laminatem własnego pomysłu, który będzie budulcem całej konstrukcji; Wybadam to jaką powinien mieć grubość aby był wystarczająco wytrzymały; Następnie spróbuję z bardziej fikuśnymi kształtami, a także tworzyć płytki z zatopionymi platikowymi tulejkami; Potrwa to z tydzień, może dwa - czasu i tak jest dużo;
Tak więc kto chętny niech się zgłasza, kto ma pytania dotyczące projektu niech pyta; Jestem otwarty zarówno na komentarze, jak i konstruktywną krytykę :]
{kind=link}